Cette page vous donne quelques détails sur la conception de l'APM 2.5
ainsi que sa mise en place sur un copter.
Ce n'est pas encore terminé !!!
 Vue côté GPS |
 Vue côté GPS |
|---|---|
 Vue côté USB |
 |
APM 2.6 est une révision de l'APM 2.5 pour un magnétomètre externe (boussole). Cette révision est optimisée pour les véhicules où la boussole doit être placée aussi loin de puissance et moteurs pour éviter les interférences magnétiques, tels que votre copter.
2.6 APM est conçue pour être utilisée avec le 3DR GPS uBlox LEA-6 avec boussole, afin que l'unité GPS/boussole puisse être montée plus loin des sources de bruit. APM 2.6 nécessite une unité GPS avec un compas à bord pour une autonomie complète.
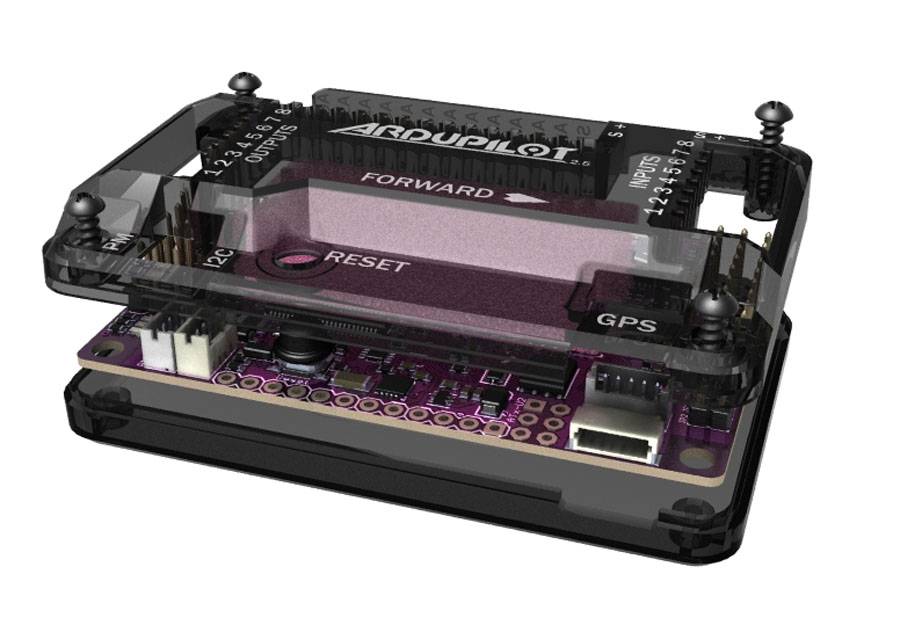
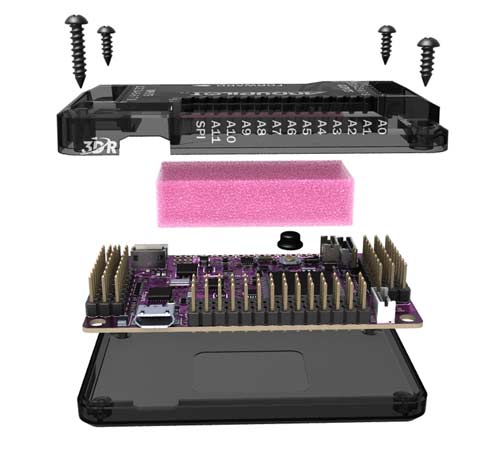
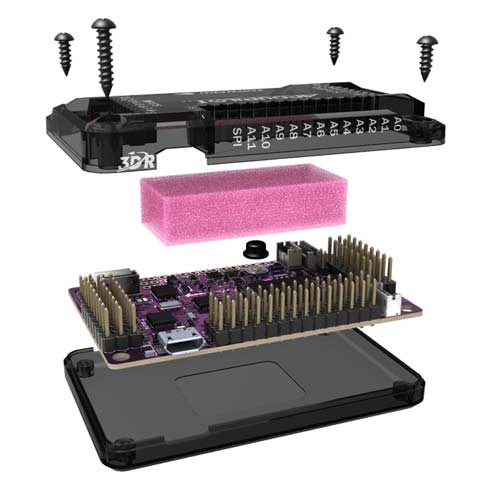
CONCEPT
 |
 |
|---|
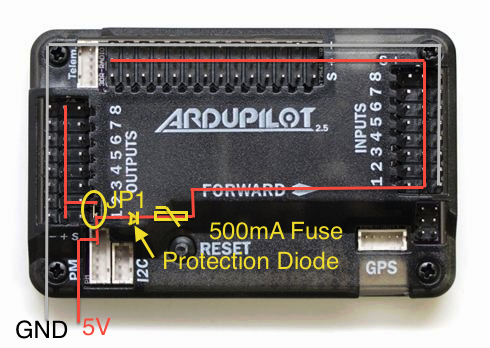
Il y a à présent une diode de protection, ainsi qu'un fusible sur l'alimentation
BRANCHEMENTS
Le diagramme suivant montre un exemple de câblage standard pour APM:Copter.
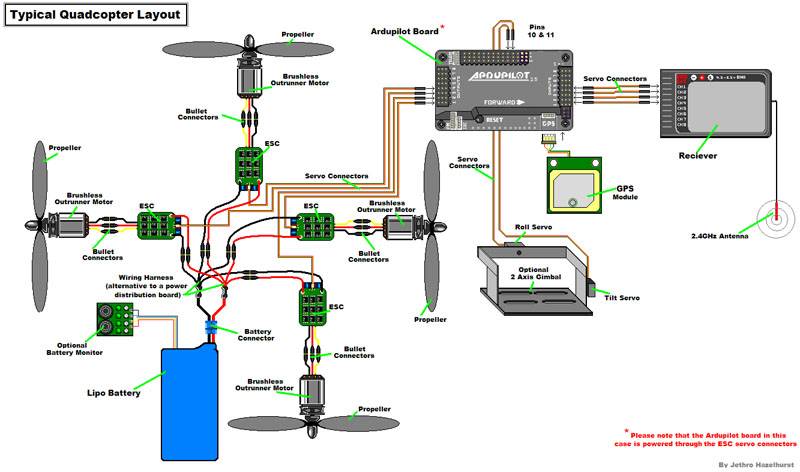
Remarquez: Elle n'est pas branchée sur la batterie des ESC, c'est volontaire !.
Une APM:Copter complète requiert les composants électroniques suivants :
◾Pilote automatique : APM:Copter prend actuellement en charge les pilotes automatiques APM et PX4.
◾Module d'alimentation avec batterie LiPo ou équivalent mise sous tension de raccordement (voir ci-dessous)(1)
◾Carte de distribution d'alimentation (PDB) ou une méthode équivalente de répartition de puissance des moteurs
◾Régulateur de vitesse électronique (ESC) pour chaque moteur
◾Moteurs
◾Émetteur et récepteur RC
Alimentation (1)
 |
 |
|---|---|
 |
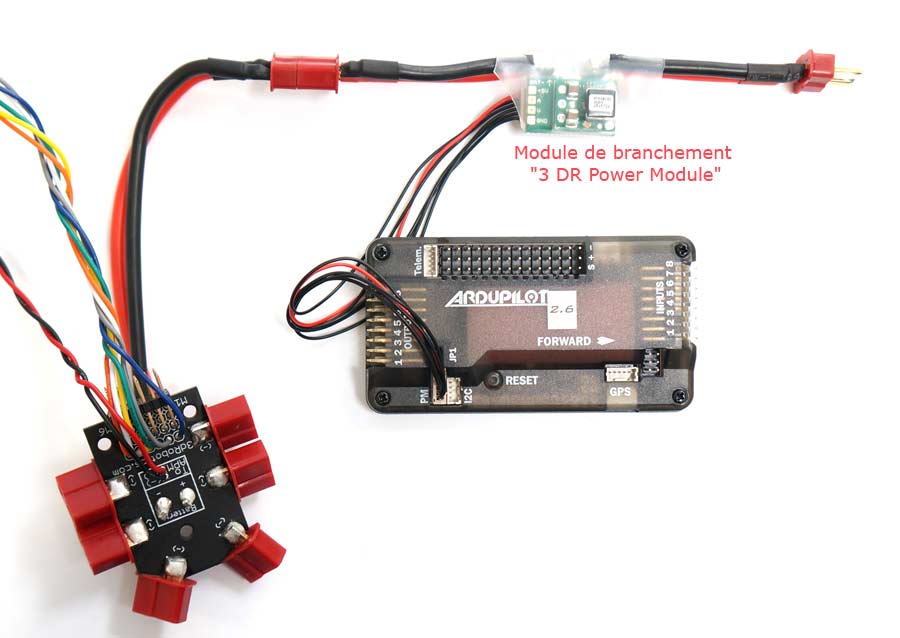
Le moyen le plus facile pour alimenter votre copter utilise un Module de puissance 3DR avec une batterie LiPo. 1) Avertissement : Ne pas dépasser les tensions d'entrée (6volts) MAX Abs lors de la connexion d'alimentation, ou vous risquez d'endommager votre carte. |
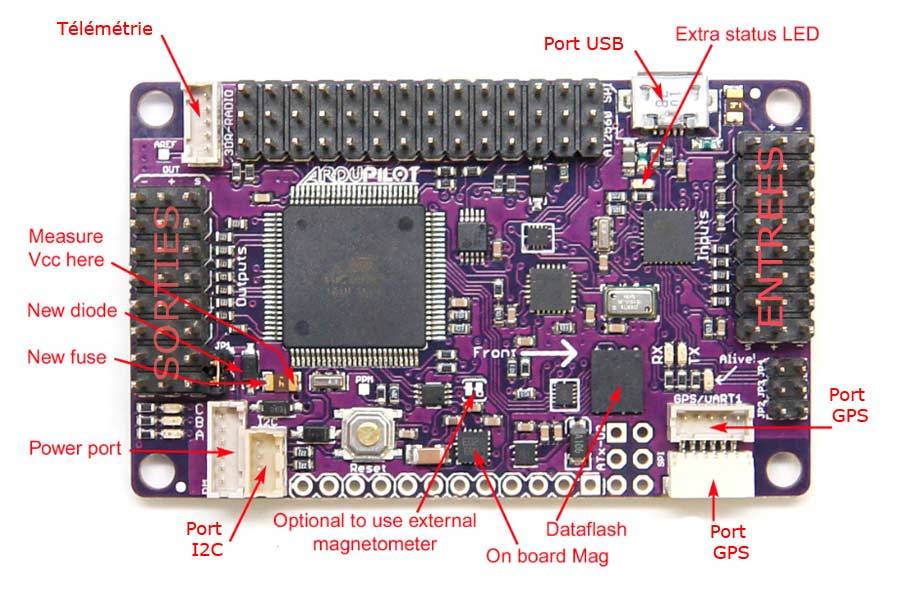
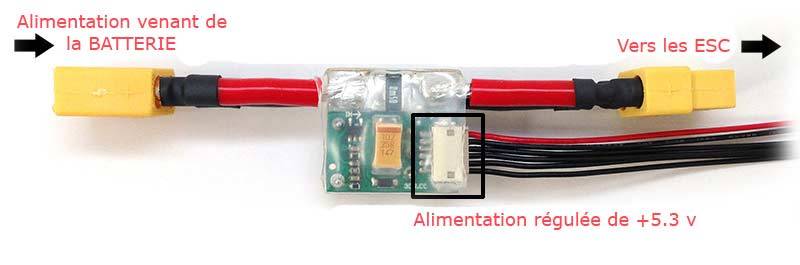
Utilisation du Power Module APM 2.5 pour mesurer le courant et la tensionL’APM 2.5 possède un connecteur dédié pour surveiller courant et tension, et aussi pour alimenter l’APM. Les sorties du Power Module APM 2.5 sont prévues pour un CAN 12 bit 5V, avec une pleine échelle de 50V and 90A. Le module intègre également un régulateur à découpage qui délivre du 5.3v sous 2.25A. Notez que la tension d’entré maximum du module est 18V (maximum autorisé par le régulateur). Connexion sur une carte APM 2.5
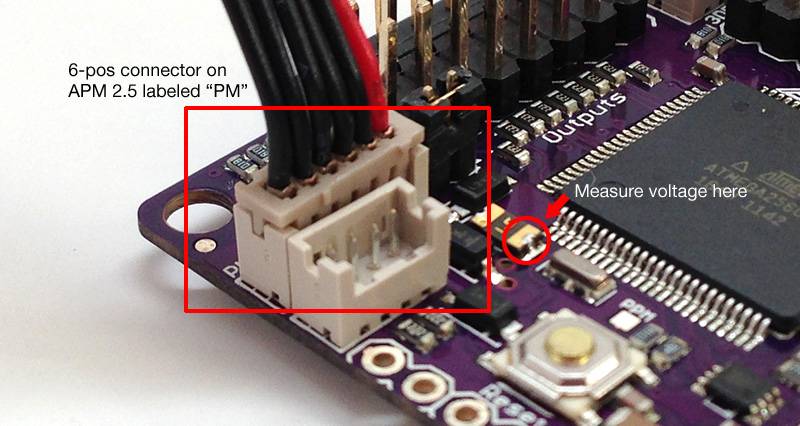
Le cable à six fils se connecte dans le Power Module et sur la carte via un connecteur à six broches. Votre batterie se connecte au connecteur male du module et votre ESC ou carte de distribution au connecteur femelle. Note pour les utilisateurs d’ArduPlane : Vous devez enlever le stap JP1 sur la carte APM quand vous utilisez le Power Module, ainsi votre électronique seule est alimenté par le régulateur du Power module, la puissance disponible n’étant pas suffisante pour alimenter des servos. En enlevant le stap vous pouvez alimenter les sortie (servos) via votre ESC. Note pour les utilisateurs d’ArduCopter : Vous devez enlever le stap JP1 sur la carte APM quand vous utilisez le Power Module, ainsi votre électronique seule est alimentée par le régulateur du Power module, et non par vos ESC. Vous pouvez laisser le strap présent si vous utilisez des ESC sans BEC (La présence du strap est sans importance dans ce cas) et, dans ce cas, seul le signal de commande et la masse (GND) seront connectés.
Paramétrage
La mesure de la tension batteries est paramètrée dans la page configuration du Mission Planner. Configuration > Hardware Option > Battery Monitor 1 Autoriser la mesure de la tension et du courant en selectionnant: Monitor Sensor APM Ver Puis renseignez la capacité de votre batterie en mAh. 2 Calibration Pour garantir une mesure fiable vous devrez mesurer la tension du regulateur du Power Module après la diode et le fusible de l’APM, un point de mesure facilement accessible est une patte du fusible comme indiqué sur l’image ci-dessus. Saisissez la valeur mesurée dans le champ labelisé .1. APM Input voltage. La donnée affiché en 3. Battery voltage (Calced) est la valeur qui sera affichée sur votre écran de données de vol. 3 Alerte tension batterie faible Vous pouvez saisir une phrase pour vous prevenir d’unz tension batterie limite. La syntèse vocale générée par le mission planner est plus particulièrement orientée langue anglaise.
Note: Pour désactiver la surveillance de la tension ou du courant, vous pouvez paramétrer BATT_CURR_PIN ou BATT_VOLT_PIN à -1 dans la liste des paramètres avancés. Utilisation du capteur AttoPilot pour mesurer la tension et le courant sur APM 1/2
Lorsqu’il est configuré pour la surveillance du courant et de la tension l’APM calcule également la puissance consommée en milli-ampère heures. Ceci est le moyen le plus précis pour mesurer la capacité batterie restante. Un capteur externe est requis. Par défaut c’est le capteur de tension/courant AttoPilot 90A/50V, qui est disponible chez SparkFun (voir ci-dessus). Le capteur fourni une valeur calibré pour la tension et le courant de batterie. Les sortie sont étudiées pour un CAN 12 bit 3.3V. La peine échelle est de 51.8V et 89.4A . Connexion sur une carte APM 2.x
|
|---|








Connectez les moteurs
Installation moteur
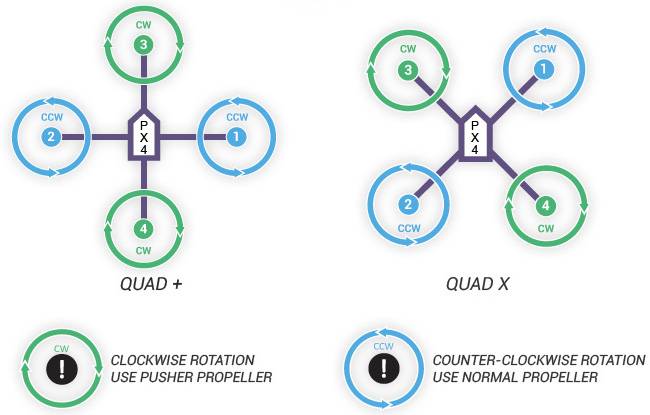
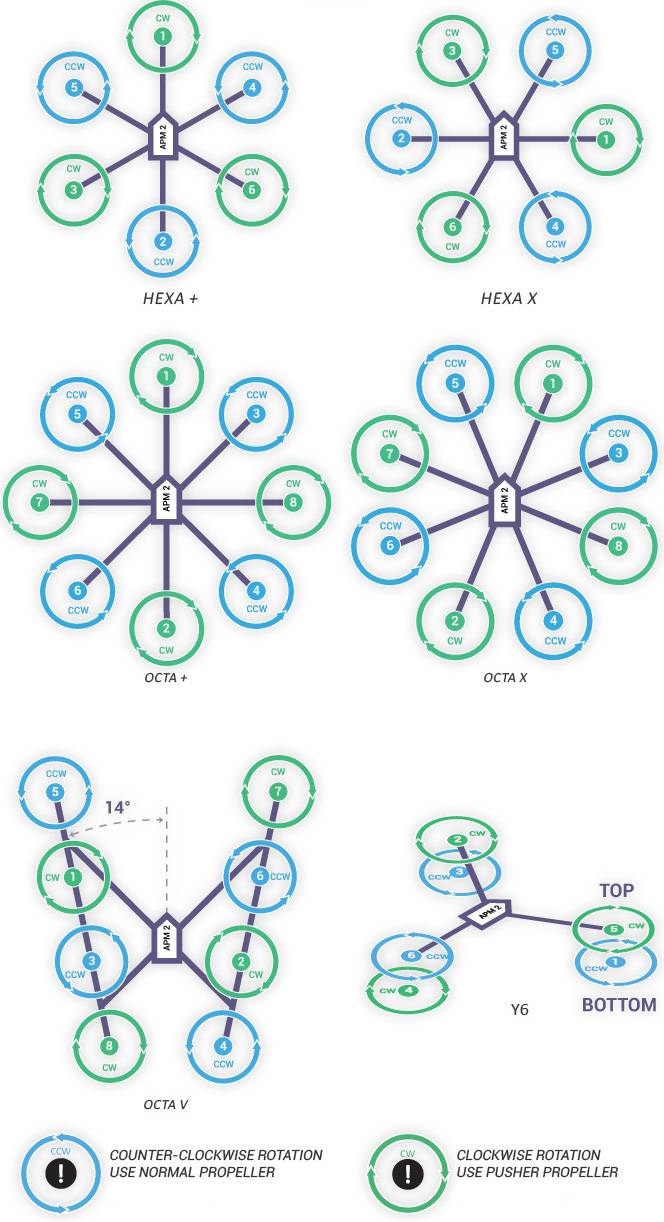
Les Multicopters exigent que les moteurs tournent dans des directions spécifiques selon leur configuration.
Dans le cadre de la première installation, vous devrez vérifier que chaque moteur tourne dans le bon sens.
Connectez les moteurs aux contrôleurs électroniques (ESC). Chaque moteur doit être connecté à une seule ESC.
 |
Branchez les ESC aux connecteurs selon le numéro du moteur (voir Configuration de moteur pour trouver la configuration de numéro moteur pour votre chassis) Exemple: ESC moteur 1 à broches marquée M1, ESC moteur 2 sur les broches marquées M2, etc.. |
|---|
Test de sens de rotation moteur
Dévisser les écrous et retirez les hélices
-
Assurez-vous qu'il n'y a aucune hélices sur votre copter !
-
Allumez l'émetteur.
-
Brancher la batterie sur le copter.
-
Maintenez la manette des gaz et de gouvernail à droite pendant cinq secondes.(selon le mode)
-
Lorsque vous pouvez armer avec succès, appliquez une petite quantité de gaz observez et noter la direction de rotation de chaque moteur.
Les moteurs doivent tourner comme indiqué dans les schémas ci-dessous selon le type.
Probablement certains de vos sens moteurs devront être permmutés.
Si un moteur doit être inversé déconnectez la batterie.
Pour inverser le sens de rotation d'un moteur, inversez deux des trois câbles reliant le moteur à l'ESC comme indiqué ci-dessous.

Fixez les hélices
Sélectionnez hélices fondés sur les directives moteurs.(10 X 4.5)
Trouver vos hélices pour moteurs marqués dans le sens horaire (CW) et les hélices marquées dans le sens antihoraire (CCW).
Hélices poussoir sont habituellement marqués « P » ou « SFP » sur l'hélice.
Dévissez les écrous de prop et ajoutez les hélices aux moteurs, avec les bagues de centrage puis rondelles, et écrous ou cône d'arrêt. Serrez les écrous pour bloquer les hélices en place. Pour les cônes, essayez d'insérer une clé hexagonale de 2 mm (5/64) dans le trou sur le côté pour obtenir le meilleur effet de levier lors du serrage des écrous.